


У ключавых звёнах складзіравання і лагістыкі, такіх як інтэлектуальная апрацоўка, камплектаванне, сартаванне і г.д., вылучаюцца робаты для захоўвання скрынак, якія задавальняюць шматлікім патрэбам. Паколькі робат-сховішча скрынак падбірае і апрацоўвае кантэйнеры, а не паліцы, паласы паміж паліцамі могуць быць вузейшымі, шчыльнасць захоўвання вышэй, захоўваецца прастора і, такім чынам, захоўваецца плата за арэнду склада; Яго функцыя "ад кантэйнера да чалавека" больш падыходзіць для большасці пабудаваных складоў, з меншымі цяжкасцямі ў трансфармацыі і лепшай гнуткасцю і сумяшчальнасцю. Аб'ектам працы робата-сховішча ў скрынцы з'яўляецца скрынка для адзінкавага матэрыялу, меншая за паліцу, таму яна больш адпавядае тэндэнцыі развіцця больш разнастайных SKU і больш вытанчаных лагістычных аперацый. У апошнія гады ён выкарыстоўваецца ў лагістыцы электроннай камерцыі і размеркаванні ў крамах, вытворчасці, воблачных сховішчах і многіх іншых сцэнарыях. У 2020 годзе робаты-сховішчы ў скрынях сталі гарачай кропкай у распрацоўцы буйных вытворцаў абсталявання для захоўвання і лагістыкі, і хваля інавацый і пераймання расце.

Робат Хагрыс Кубо
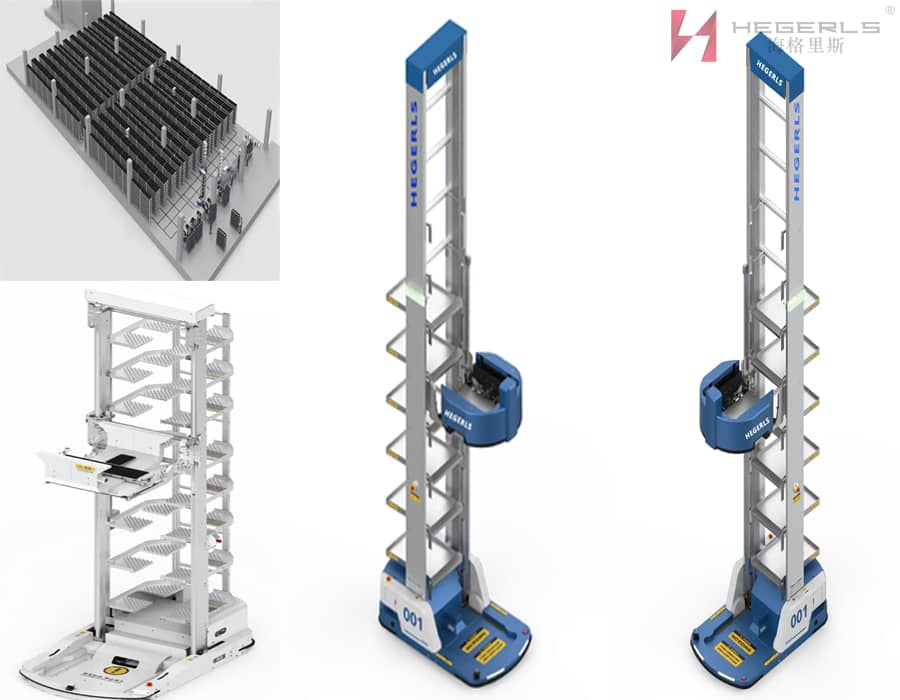
Робат hegerls "кантэйнер для чалавека" kubao быў распрацаваны і пратэставаны. Робат можа дакладна знайсці адпаведны тавар у адпаведнасці з патрабаваннямі замовы. У той жа час, дзякуючы бесперапынным ітэрацыям і інавацыям прадукту, да гэтага часу быў запушчаны шэраг робатаў kubao: шматслойны кантэйнерны робат hegerls A42, двайны глыбокі кантэйнерны робат hegerls a42d, кардонны робат для сартавання скрынак hegerls a42n, тэлескапічны пад'ёмны кантэйнерны робат hegerls a42t і шматслаёвы кантэйнерны робат Hegerls A42, які паступова ахоплівае мноства сцэнарыяў прымянення робатаў-сховішчаў скрынак. У сувязі з гэтым сёння мы пагаворым аб скрынцы дынамічнай рэгулявання шырыні robot hegerls a42-fw.
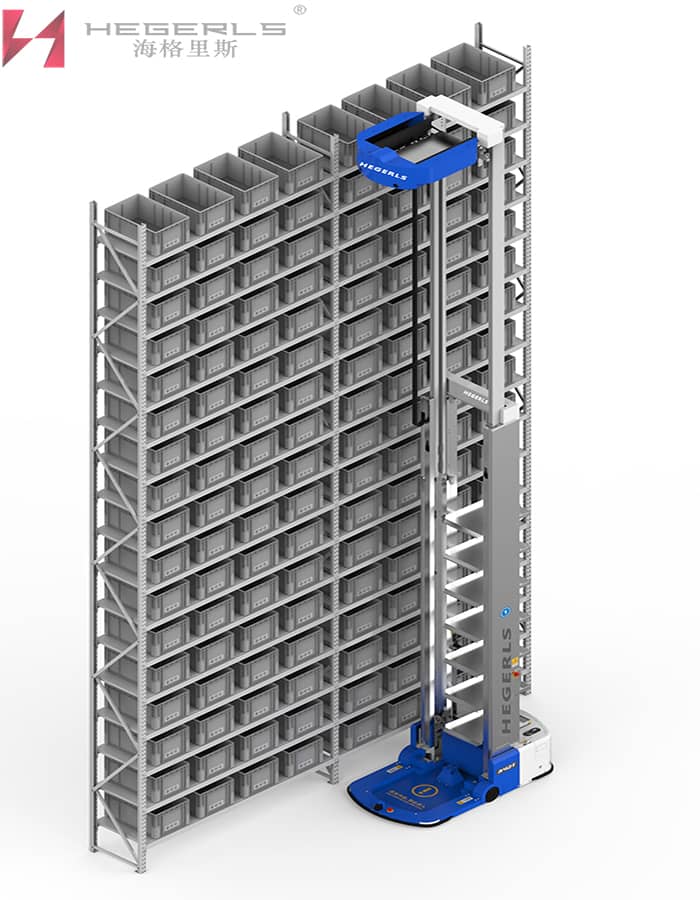
Hegerls a42-fw, робат каробкавага тыпу з дынамічным рэгуляваннем шырыні, выкарыстоўвае тэхналогію відэльцаў дынамічнага рэгулявання шырыні для дынамічнага рэгулявання шырыні відэльцаў у адпаведнасці з памерам скрыні, каб забяспечыць працу па зборы і апрацоўцы каробак розных памераў. Дзякуючы інтэлектуальнай платформе кіравання haiq, заснаванай на магутнай вылічальнай магутнасці штучнага інтэлекту, робат можа аўтаматычна выдзяляць аптымальнае месца для захоўвання ў залежнасці ад памеру скрыні, забяспечваць мінімальную прастору паміж месцамі для захоўвання і максімальна выкарыстоўваць паліцы для захоўвання. Згодна з тым, што hegerls a42-fw можа павялічыць колькасць кантэйнераў, якія захоўваюцца, амаль на 20% у параўнанні з робатам з фіксаванай відэльцам з моманту яго ўвядзення ў эксплуатацыю на буйных прадпрыемствах.

Характарыстыкі каробкавага робата дынамічнай рэгулявання шырыні hegerls a42-fw
Робат Kubao hegerls a42-fw з дынамічным рэгуляваннем шырыні скрынкі самастойна распрацоўвае тэхналогію відэльцаў дынамічнай рэгулявання шырыні, дынамічна рэгулюе памер відэльцы ў адпаведнасці з памерам скрыні і рэалізуе збор і апрацоўку кардонных каробак / бункераў розных памераў. У якасці новага інтэлектуальнага лагістычнага абсталявання hegerls a42-fw можа рэалізаваць інтэлектуальнае хаджэнне ў сховішчы без дапамогі якога-небудзь гусенічнага абсталявання і мае функцыі аўтаномнай навігацыі, актыўнага пазбягання перашкод і аўтаматычнай зарадкі. У параўнанні з традыцыйным рашэннем AGV "ад паліцы да чалавека", дэталізацыя камплектацыі робата kubao меншая. У адпаведнасці з патрабаваннямі да замовы, выдадзенымі сістэмай, яна сапраўды рэалізуе пераход ад традыцыйнага рэжыму «людзі, якія шукаюць тавар» да эфектыўнага і простага інтэлектуальнага рэжыму «тавар чалавеку». У параўнанні з рашэннямі ўкладчыка і аўтаматычнага трохмернага склада, сістэма робата kubao можа рэалізаваць эфектыўнае разгортванне з нізкімі агульнымі выдаткамі на разгортванне і большай гнуткасцю; У той жа час hegerls a42-fw падтрымлівае стыкоўку рознага лагістычнага абсталявання, уключаючы паліцы, канвеерныя лініі, механічныя рычагі, шматфункцыянальныя працоўныя станцыі і г.д. складскіх аперацый, аптымізуе шчыльнасць складзіравання, а таксама рэалізуе аўтаматызацыю і інтэлектуальную трансфармацыю складской галіны. Дастасавальны сцэнар: ён падыходзіць для сцэнарыя змешанага захоўвання кантэйнераў розных памераў, напрыклад, для сцэнарыя прымянення кардоннай скрынкі / кардоннай скрынкі для змешанага захоўвання склада, напрыклад, абутку і адзення, электроннай камерцыі і г.д.


Перавагі скрынкі дынамічнай рэгулявання шырыні робата hegerls a42-fw
Дынамічна пашыраная відэлец
Hegerls a42-fw, дынамічны скрынкавы робат з рэгуляваннем шырыні, можа рэгуляваць відэльцы для разумнай адаптацыі да розных памераў кантэйнераў і кардонных скрынак;
Дынамічнае размяшчэнне
Hegerls a42-fw, скрынкавы робат з дынамічным рэгуляваннем шырыні, выкарыстоўвае алгарытм haiq для дынамічнага рэгулявання шырыні відэльцаў, каб разумна падабраць аптымальнае становішча для захоўвання;
Шырыня корпуса 900 мм
Шырыня фюзеляжа робата Hegerls a42-fw з скрынкай дынамічнай рэгулявання шырыні звычайна складае 900 мм, а шырыня праезнай часткі вузкая да 1000 мм;
Міжслойная паліца
Адлегласць паміж паліцамі скрынкі дынамічнай рэгулявання шырыні робата hegerls a42-fw можна паменшыць як мінімум да 250 мм. Інтэрвал тут адносіцца да таго, што калі ёсць код, калі кода няма, яго можна паменшыць да 300 мм;
Сцэнар энергаспажывання
Hegerls a42-fw, робат каробкавага тыпу з дынамічным рэгуляваннем шырыні, звычайна выкарыстоўвае рэжым хуткага абмену магутнасцю 10 с, каб задаволіць тэрміновыя сцэнарыі энергаспажывання буйнога і сярэдняга прасоўвання;
вышыня
Тут маецца на ўвазе вышыня пікапа. Мінімальны дыяпазон вышыні пікапа робата Hegerls a42-fw з скрынкай дынамічнай рэгулявання шырыні складае 190 мм;
Тэхналогія 3d відэа
Hegerls a42-fw, робат каробкавага тыпу з дынамічным рэгуляваннем шырыні, прымае ідэнтыфікацыю без кода, каб забраць і размясціць тавары, і выкарыстоўвае перадавую тэхналогію 3D-візуальнага распазнавання.

Хагерлс - пра будучыню
Фактычна, незалежна ад распрацоўкі і вытворчасці робатаў-сховішчаў каробак Hegerls або выкарыстання робатаў-сховішчаў каробак буйнымі прадпрыемствамі, тэхналогія робатаў-сховішчаў скрынак мае невымерныя перспектывы развіцця:
З дапамогай тэхналогіі візуальнага штучнага інтэлекту робат можа дакладна вызначаць становішча і вышыню мэтавага скрыні з матэрыялам і ажыццяўляць дакладны выбар і размяшчэнне скрыні з матэрыялам без кода. Акрамя таго, ён таксама можа гнутка падключацца да рознага абсталявання для захоўвання і лагістыкі, уключаючы ролікі, паліцы, латэнтныя AGV, штучныя працоўныя станцыі і іншыя аперацыйныя платформы, якія маюць больш шырокі спектр функцый; Што тычыцца навігацыі па шляху, робат-сховішча скрынак перайшоў ад традыцыйнай двухмернай кодавай навігацыі да візуальнай навігацыі, а затым да лазернай навігацыі. Тэхналогія становіцца ўсё больш і больш сталай, якая можа эфектыўна атрымліваць знешнія тавары і інфармацыю аб навакольным асяроддзі, аўтаматычна пазбягаць перашкод і адаптавацца да больш складанай і зменлівай рабочай асяроддзя склада; Арыгінальны робат-кантэйнер меў толькі адно месца для бункера, і эфектыўнасць збору была нізкай. На аснове робата-сховішча скрынак, распрацаванага Hegerls, Hegris, робат з некалькімі пазіцыямі буфера бункераў, які можа збіраць некалькі мэтавых бункераў адначасова, рэалізаваць больш частае падборку і апрацоўку меншай колькасцю робатаў і значна палепшыць эфектыўнасць працы і захоўвання шчыльнасць.
Час публікацыі: 4 ліпеня 2022 г